









다 같은 ‘무인차’가 아닙니다
입력 2016.10.28 (20:10)
수정 2016.10.28 (21:14)
읽어주기 기능은 크롬기반의
브라우저에서만 사용하실 수 있습니다.

인천의 한 자동차운전학원 코스를 빌려 진행된 대학생 자율주행차 경진대회에 참가한 차들입니다. 양산차인 현대자동차의 아반떼를 대학생들이 개조한 것이죠. 언뜻 보면 비슷비슷하게 보입니다. 그러나 자세히 살펴보시면 다른 점이 명확합니다. 무엇일까요? 정답은 차차 말씀해 드리죠.



 각종 센서를 부착한 차량
각종 센서를 부착한 차량
무인차, 자율주행차는 더 이상 미래의 자동차가 아닙니다. 이미 실제 도로 주행에 투입한 나라들도 있죠. 국내에서도 자동차 업체는 물론 대학에서도 자율주행차 기술을 개발 중입니다.
이번 대회는 현대기아차가 이들 대학들에게 부품과 개발비를 지원해 진행됐습니다. 서울대, 연세대, 카이스트 등 12개 참가 대학들은 현대차로부터 한 팀당 라이다 4대와 카메라 5대. 연구개발비 3천만 원을 받았습니다. 같은 부품과 일정 수준의 개발비 이하로 똑같은 조건을 맞춰야 공정한 경쟁이 되기 때문입니다. 대학들은 이 제한 안에서 받은 아반떼를 개조해야 합니다.
무인차의 원리는 간단하게 설명하자면 이런 겁니다. 센서로 외부 상황을 인식하고, 이를 소프트웨어를 이용해 판단한 뒤 엔진과 기어, 제동 장치 등에 명령을 보내주죠. 라이다는 레이저를 이용해 물체의 형상을 인식하고, 카메라는 빛을 이용합니다.
 라이다
라이다
 카메라
카메라
그런데 재미있는 관전 포인트가 있습니다. 라이더를 어디에 장착할지, 카메라를 어떻게 활용할지는 각 팀이 자율적으로 결정합니다. 제공받은 라이더를 다 써도 되고, 한두 개만 써도 됩니다. 지붕에 달아도 되고, 범퍼 양쪽에 달아도 됩니다.
오늘 참가한 대부분의 차들은 차랑 앞범퍼에 라이다 1개, 지붕에 2개, 후방에 1개를 설치했습니다. 카메라는 양 사이드미러 아래와 앞, 뒤범퍼, 차량 내부의 룸미러 근처에 장착한 팀이 대부분입니다.
 카이스트팀 차량
카이스트팀 차량
하지만 눈길을 끄는 팀이 있습니다. 카이스트팀은 라이더를 앞범퍼에 하나만 장착했습니다. 사진에 나오듯 지붕에 장착한 것이 거의 보이지 않습니다. 그런데도 라이다 4개를 모두 장착한 차량보다 우수한 성적을 기록했습니다.
라이다는 레이저를 이용해 물체의 형상을 신호로 인식합니다. 하지만 카메라가 보다 명확하게 인식하기 때문에 카이스팀은 라이다를 과감히 포기하고 카메라 활용에 주력했습니다. 센서는 카메라에 중점을 두고, 대신에 센서가 받아들인 신호를 처리하는 소프트웨어에 승부를 걸었습니다. 알파고에 활용된 딥러닝 기술을 응용했습니다. 이렇게 하면 자동차가 여러 상황을 스스로 학습해서 판단을 합니다. 시험 주행을 계속할수록 차가 더 똑똑한 판단을 내리는겁니다.
 성균관대 차량
성균관대 차량
이 차도 뭔가 다릅니다. 차이가 보이시나요? 라이다 4개를 차량 지붕 위에 모아서 올렸습니다. 주행 중에는 이 라이다가 360도로 계속 회전합니다. 구글의 무인차량이 채택한 방식입니다. 라이다 한 개는 위아래로는 수직으로, 좌우로는 약 180도를 감지합니다. 이 때문에 차가 둔턱을 넘어가거나 흔들리면 순간적으로 탐지 범위가 변하면서 놓치는 사각이 생깁니다. 그래서 이 차처럼 라이다를 수평으로 세워서 4방향으로 배치한 뒤 회전시키는 아이디어가 나온 겁니다. 탐지 범위를 넓혀서 사각을 줄이고 인식률을 높이려는 목적입니다.
 기어스틱 조정장치
기어스틱 조정장치
 비상정지 스위치
비상정지 스위치
부품과 비용의 제한 이외에도 지켜야 하는 규정이 있습니다. 엔진, 기어, 제동장치 제어는 전자신호가 아니라 물리적으로 해야 합니다. 차량의 전자두뇌, 컴퓨터로 치면 CPU에 해당하는 ECU에 바로 신호를 보내서 제어할 수 있지만, ECU를 조작하려면 ECU의 코드를 알아야 합니다. 그런데 그건 자동차 업체의 영업 기밀에 해당합니다. 이 때문에 ECU 조작을 허용할 때 어느 정도까지 그 대학팀에게 ECU 정보를 알려주는가에 따라 형평성 논란이 있을 수 있습니다. 그래서 참가팀들은 모터나 와이어, 또는 로봇 팔 장치 등 물리적인 힘으로 기어를 바꾸고, 브레이크와 가속페달을 조작해야 합니다. 그리고 혹시 모를 돌발 상황에 대비해 외부에서 누르면 바로 정지하는 스위치가 필요합니다.
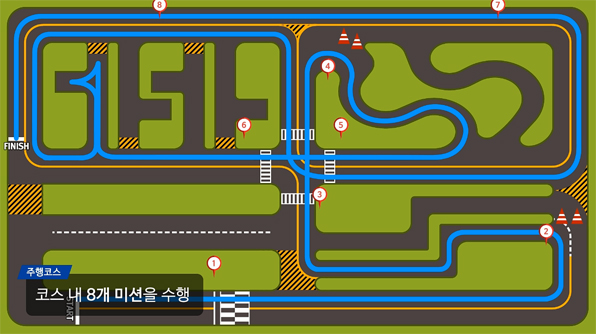 대회코스
대회코스
참가 차들은 이런 코스를 20분 안에 주행해야 합니다. 실제 운전면허 시험처럼 둔턱을 넘고, 정지선을 지켜야 하고, 앞에 사람 모양의 마네킹이 나오면 순식간에 정지해야 합니다. T자 주차 코스도 있는데, 어려운 기술이어서 그런지 시도하는 팀은 많지 않았습니다. 거기서 시간을 허비하느니 전체 주행 시간을 줄이는 것이 유리하다는 판단에서입니다. 가다가 코스를 벗어나는 경우 차가 스스로 재출발할 때, 사람이 조작을 한 뒤 재출발 할 때 감점도 다릅니다.
참가팀의 실력은 하루 만에 일취월장했다고 합니다. 어제 시험주행 때만 해도 코스를 완전히 벗어나거나 엉뚱하게 가는 차들이 많았다는데 오늘은 그런 모습은 보기 어려웠습니다. 시험 주행을 한 뒤 학생들은 코스에 맞춰 밤새 라이다와 카메라 각도를 조절하고, 운행 소프트웨어도 수정하느라 밤을 새웠습니다. 물론 차가 이러지도 저러지고 못하고 앞 뒤로 움직인다거나 코스를 일부 이탈하는 경우는 빈번했습니다. 완벽하게 달리면 그건 대학생들이 만든 자율주행차가 아니겠죠.
하지만 분명히 말씀드릴 수 있는 건 16년 전 제가 운전면허를 따기 위해 운전학원 코스를 처음 주행하던 때보단 더 훌륭하게 나아가는 차가 많았다는 겁니다. 난코스에서 차가 헤맬 때 아쉬움의 탄식을, 어려운 과제를 거뜬히 돌파할 때 환호와 박수를 보내는 대학생들이 구현해낸 기술의 진보 덕입니다.
각종 센서를 부착한 차량무인차, 자율주행차는 더 이상 미래의 자동차가 아닙니다. 이미 실제 도로 주행에 투입한 나라들도 있죠. 국내에서도 자동차 업체는 물론 대학에서도 자율주행차 기술을 개발 중입니다.
이번 대회는 현대기아차가 이들 대학들에게 부품과 개발비를 지원해 진행됐습니다. 서울대, 연세대, 카이스트 등 12개 참가 대학들은 현대차로부터 한 팀당 라이다 4대와 카메라 5대. 연구개발비 3천만 원을 받았습니다. 같은 부품과 일정 수준의 개발비 이하로 똑같은 조건을 맞춰야 공정한 경쟁이 되기 때문입니다. 대학들은 이 제한 안에서 받은 아반떼를 개조해야 합니다.
무인차의 원리는 간단하게 설명하자면 이런 겁니다. 센서로 외부 상황을 인식하고, 이를 소프트웨어를 이용해 판단한 뒤 엔진과 기어, 제동 장치 등에 명령을 보내주죠. 라이다는 레이저를 이용해 물체의 형상을 인식하고, 카메라는 빛을 이용합니다.
라이다카메라그런데 재미있는 관전 포인트가 있습니다. 라이더를 어디에 장착할지, 카메라를 어떻게 활용할지는 각 팀이 자율적으로 결정합니다. 제공받은 라이더를 다 써도 되고, 한두 개만 써도 됩니다. 지붕에 달아도 되고, 범퍼 양쪽에 달아도 됩니다.
오늘 참가한 대부분의 차들은 차랑 앞범퍼에 라이다 1개, 지붕에 2개, 후방에 1개를 설치했습니다. 카메라는 양 사이드미러 아래와 앞, 뒤범퍼, 차량 내부의 룸미러 근처에 장착한 팀이 대부분입니다.
카이스트팀 차량하지만 눈길을 끄는 팀이 있습니다. 카이스트팀은 라이더를 앞범퍼에 하나만 장착했습니다. 사진에 나오듯 지붕에 장착한 것이 거의 보이지 않습니다. 그런데도 라이다 4개를 모두 장착한 차량보다 우수한 성적을 기록했습니다.
라이다는 레이저를 이용해 물체의 형상을 신호로 인식합니다. 하지만 카메라가 보다 명확하게 인식하기 때문에 카이스팀은 라이다를 과감히 포기하고 카메라 활용에 주력했습니다. 센서는 카메라에 중점을 두고, 대신에 센서가 받아들인 신호를 처리하는 소프트웨어에 승부를 걸었습니다. 알파고에 활용된 딥러닝 기술을 응용했습니다. 이렇게 하면 자동차가 여러 상황을 스스로 학습해서 판단을 합니다. 시험 주행을 계속할수록 차가 더 똑똑한 판단을 내리는겁니다.
성균관대 차량이 차도 뭔가 다릅니다. 차이가 보이시나요? 라이다 4개를 차량 지붕 위에 모아서 올렸습니다. 주행 중에는 이 라이다가 360도로 계속 회전합니다. 구글의 무인차량이 채택한 방식입니다. 라이다 한 개는 위아래로는 수직으로, 좌우로는 약 180도를 감지합니다. 이 때문에 차가 둔턱을 넘어가거나 흔들리면 순간적으로 탐지 범위가 변하면서 놓치는 사각이 생깁니다. 그래서 이 차처럼 라이다를 수평으로 세워서 4방향으로 배치한 뒤 회전시키는 아이디어가 나온 겁니다. 탐지 범위를 넓혀서 사각을 줄이고 인식률을 높이려는 목적입니다.
기어스틱 조정장치비상정지 스위치부품과 비용의 제한 이외에도 지켜야 하는 규정이 있습니다. 엔진, 기어, 제동장치 제어는 전자신호가 아니라 물리적으로 해야 합니다. 차량의 전자두뇌, 컴퓨터로 치면 CPU에 해당하는 ECU에 바로 신호를 보내서 제어할 수 있지만, ECU를 조작하려면 ECU의 코드를 알아야 합니다. 그런데 그건 자동차 업체의 영업 기밀에 해당합니다. 이 때문에 ECU 조작을 허용할 때 어느 정도까지 그 대학팀에게 ECU 정보를 알려주는가에 따라 형평성 논란이 있을 수 있습니다. 그래서 참가팀들은 모터나 와이어, 또는 로봇 팔 장치 등 물리적인 힘으로 기어를 바꾸고, 브레이크와 가속페달을 조작해야 합니다. 그리고 혹시 모를 돌발 상황에 대비해 외부에서 누르면 바로 정지하는 스위치가 필요합니다.
대회코스참가 차들은 이런 코스를 20분 안에 주행해야 합니다. 실제 운전면허 시험처럼 둔턱을 넘고, 정지선을 지켜야 하고, 앞에 사람 모양의 마네킹이 나오면 순식간에 정지해야 합니다. T자 주차 코스도 있는데, 어려운 기술이어서 그런지 시도하는 팀은 많지 않았습니다. 거기서 시간을 허비하느니 전체 주행 시간을 줄이는 것이 유리하다는 판단에서입니다. 가다가 코스를 벗어나는 경우 차가 스스로 재출발할 때, 사람이 조작을 한 뒤 재출발 할 때 감점도 다릅니다.
참가팀의 실력은 하루 만에 일취월장했다고 합니다. 어제 시험주행 때만 해도 코스를 완전히 벗어나거나 엉뚱하게 가는 차들이 많았다는데 오늘은 그런 모습은 보기 어려웠습니다. 시험 주행을 한 뒤 학생들은 코스에 맞춰 밤새 라이다와 카메라 각도를 조절하고, 운행 소프트웨어도 수정하느라 밤을 새웠습니다. 물론 차가 이러지도 저러지고 못하고 앞 뒤로 움직인다거나 코스를 일부 이탈하는 경우는 빈번했습니다. 완벽하게 달리면 그건 대학생들이 만든 자율주행차가 아니겠죠.
하지만 분명히 말씀드릴 수 있는 건 16년 전 제가 운전면허를 따기 위해 운전학원 코스를 처음 주행하던 때보단 더 훌륭하게 나아가는 차가 많았다는 겁니다. 난코스에서 차가 헤맬 때 아쉬움의 탄식을, 어려운 과제를 거뜬히 돌파할 때 환호와 박수를 보내는 대학생들이 구현해낸 기술의 진보 덕입니다.
■ 제보하기
▷ 카카오톡 : 'KBS제보' 검색, 채널 추가
▷ 전화 : 02-781-1234, 4444
▷ 이메일 : kbs1234@kbs.co.kr
▷ 유튜브, 네이버, 카카오에서도 KBS뉴스를 구독해주세요!
- 다 같은 ‘무인차’가 아닙니다
-
- 입력 2016-10-28 20:10:04
- 수정2016-10-28 21:14:16
인천의 한 자동차운전학원 코스를 빌려 진행된 대학생 자율주행차 경진대회에 참가한 차들입니다. 양산차인 현대자동차의 아반떼를 대학생들이 개조한 것이죠. 언뜻 보면 비슷비슷하게 보입니다. 그러나 자세히 살펴보시면 다른 점이 명확합니다. 무엇일까요? 정답은 차차 말씀해 드리죠.
무인차, 자율주행차는 더 이상 미래의 자동차가 아닙니다. 이미 실제 도로 주행에 투입한 나라들도 있죠. 국내에서도 자동차 업체는 물론 대학에서도 자율주행차 기술을 개발 중입니다.
이번 대회는 현대기아차가 이들 대학들에게 부품과 개발비를 지원해 진행됐습니다. 서울대, 연세대, 카이스트 등 12개 참가 대학들은 현대차로부터 한 팀당 라이다 4대와 카메라 5대. 연구개발비 3천만 원을 받았습니다. 같은 부품과 일정 수준의 개발비 이하로 똑같은 조건을 맞춰야 공정한 경쟁이 되기 때문입니다. 대학들은 이 제한 안에서 받은 아반떼를 개조해야 합니다.
무인차의 원리는 간단하게 설명하자면 이런 겁니다. 센서로 외부 상황을 인식하고, 이를 소프트웨어를 이용해 판단한 뒤 엔진과 기어, 제동 장치 등에 명령을 보내주죠. 라이다는 레이저를 이용해 물체의 형상을 인식하고, 카메라는 빛을 이용합니다.
그런데 재미있는 관전 포인트가 있습니다. 라이더를 어디에 장착할지, 카메라를 어떻게 활용할지는 각 팀이 자율적으로 결정합니다. 제공받은 라이더를 다 써도 되고, 한두 개만 써도 됩니다. 지붕에 달아도 되고, 범퍼 양쪽에 달아도 됩니다.
오늘 참가한 대부분의 차들은 차랑 앞범퍼에 라이다 1개, 지붕에 2개, 후방에 1개를 설치했습니다. 카메라는 양 사이드미러 아래와 앞, 뒤범퍼, 차량 내부의 룸미러 근처에 장착한 팀이 대부분입니다.
하지만 눈길을 끄는 팀이 있습니다. 카이스트팀은 라이더를 앞범퍼에 하나만 장착했습니다. 사진에 나오듯 지붕에 장착한 것이 거의 보이지 않습니다. 그런데도 라이다 4개를 모두 장착한 차량보다 우수한 성적을 기록했습니다.
라이다는 레이저를 이용해 물체의 형상을 신호로 인식합니다. 하지만 카메라가 보다 명확하게 인식하기 때문에 카이스팀은 라이다를 과감히 포기하고 카메라 활용에 주력했습니다. 센서는 카메라에 중점을 두고, 대신에 센서가 받아들인 신호를 처리하는 소프트웨어에 승부를 걸었습니다. 알파고에 활용된 딥러닝 기술을 응용했습니다. 이렇게 하면 자동차가 여러 상황을 스스로 학습해서 판단을 합니다. 시험 주행을 계속할수록 차가 더 똑똑한 판단을 내리는겁니다.
이 차도 뭔가 다릅니다. 차이가 보이시나요? 라이다 4개를 차량 지붕 위에 모아서 올렸습니다. 주행 중에는 이 라이다가 360도로 계속 회전합니다. 구글의 무인차량이 채택한 방식입니다. 라이다 한 개는 위아래로는 수직으로, 좌우로는 약 180도를 감지합니다. 이 때문에 차가 둔턱을 넘어가거나 흔들리면 순간적으로 탐지 범위가 변하면서 놓치는 사각이 생깁니다. 그래서 이 차처럼 라이다를 수평으로 세워서 4방향으로 배치한 뒤 회전시키는 아이디어가 나온 겁니다. 탐지 범위를 넓혀서 사각을 줄이고 인식률을 높이려는 목적입니다.
부품과 비용의 제한 이외에도 지켜야 하는 규정이 있습니다. 엔진, 기어, 제동장치 제어는 전자신호가 아니라 물리적으로 해야 합니다. 차량의 전자두뇌, 컴퓨터로 치면 CPU에 해당하는 ECU에 바로 신호를 보내서 제어할 수 있지만, ECU를 조작하려면 ECU의 코드를 알아야 합니다. 그런데 그건 자동차 업체의 영업 기밀에 해당합니다. 이 때문에 ECU 조작을 허용할 때 어느 정도까지 그 대학팀에게 ECU 정보를 알려주는가에 따라 형평성 논란이 있을 수 있습니다. 그래서 참가팀들은 모터나 와이어, 또는 로봇 팔 장치 등 물리적인 힘으로 기어를 바꾸고, 브레이크와 가속페달을 조작해야 합니다. 그리고 혹시 모를 돌발 상황에 대비해 외부에서 누르면 바로 정지하는 스위치가 필요합니다.
참가 차들은 이런 코스를 20분 안에 주행해야 합니다. 실제 운전면허 시험처럼 둔턱을 넘고, 정지선을 지켜야 하고, 앞에 사람 모양의 마네킹이 나오면 순식간에 정지해야 합니다. T자 주차 코스도 있는데, 어려운 기술이어서 그런지 시도하는 팀은 많지 않았습니다. 거기서 시간을 허비하느니 전체 주행 시간을 줄이는 것이 유리하다는 판단에서입니다. 가다가 코스를 벗어나는 경우 차가 스스로 재출발할 때, 사람이 조작을 한 뒤 재출발 할 때 감점도 다릅니다.
참가팀의 실력은 하루 만에 일취월장했다고 합니다. 어제 시험주행 때만 해도 코스를 완전히 벗어나거나 엉뚱하게 가는 차들이 많았다는데 오늘은 그런 모습은 보기 어려웠습니다. 시험 주행을 한 뒤 학생들은 코스에 맞춰 밤새 라이다와 카메라 각도를 조절하고, 운행 소프트웨어도 수정하느라 밤을 새웠습니다. 물론 차가 이러지도 저러지고 못하고 앞 뒤로 움직인다거나 코스를 일부 이탈하는 경우는 빈번했습니다. 완벽하게 달리면 그건 대학생들이 만든 자율주행차가 아니겠죠.
하지만 분명히 말씀드릴 수 있는 건 16년 전 제가 운전면허를 따기 위해 운전학원 코스를 처음 주행하던 때보단 더 훌륭하게 나아가는 차가 많았다는 겁니다. 난코스에서 차가 헤맬 때 아쉬움의 탄식을, 어려운 과제를 거뜬히 돌파할 때 환호와 박수를 보내는 대학생들이 구현해낸 기술의 진보 덕입니다.
무인차, 자율주행차는 더 이상 미래의 자동차가 아닙니다. 이미 실제 도로 주행에 투입한 나라들도 있죠. 국내에서도 자동차 업체는 물론 대학에서도 자율주행차 기술을 개발 중입니다.
이번 대회는 현대기아차가 이들 대학들에게 부품과 개발비를 지원해 진행됐습니다. 서울대, 연세대, 카이스트 등 12개 참가 대학들은 현대차로부터 한 팀당 라이다 4대와 카메라 5대. 연구개발비 3천만 원을 받았습니다. 같은 부품과 일정 수준의 개발비 이하로 똑같은 조건을 맞춰야 공정한 경쟁이 되기 때문입니다. 대학들은 이 제한 안에서 받은 아반떼를 개조해야 합니다.
무인차의 원리는 간단하게 설명하자면 이런 겁니다. 센서로 외부 상황을 인식하고, 이를 소프트웨어를 이용해 판단한 뒤 엔진과 기어, 제동 장치 등에 명령을 보내주죠. 라이다는 레이저를 이용해 물체의 형상을 인식하고, 카메라는 빛을 이용합니다.
그런데 재미있는 관전 포인트가 있습니다. 라이더를 어디에 장착할지, 카메라를 어떻게 활용할지는 각 팀이 자율적으로 결정합니다. 제공받은 라이더를 다 써도 되고, 한두 개만 써도 됩니다. 지붕에 달아도 되고, 범퍼 양쪽에 달아도 됩니다.
오늘 참가한 대부분의 차들은 차랑 앞범퍼에 라이다 1개, 지붕에 2개, 후방에 1개를 설치했습니다. 카메라는 양 사이드미러 아래와 앞, 뒤범퍼, 차량 내부의 룸미러 근처에 장착한 팀이 대부분입니다.
하지만 눈길을 끄는 팀이 있습니다. 카이스트팀은 라이더를 앞범퍼에 하나만 장착했습니다. 사진에 나오듯 지붕에 장착한 것이 거의 보이지 않습니다. 그런데도 라이다 4개를 모두 장착한 차량보다 우수한 성적을 기록했습니다.
라이다는 레이저를 이용해 물체의 형상을 신호로 인식합니다. 하지만 카메라가 보다 명확하게 인식하기 때문에 카이스팀은 라이다를 과감히 포기하고 카메라 활용에 주력했습니다. 센서는 카메라에 중점을 두고, 대신에 센서가 받아들인 신호를 처리하는 소프트웨어에 승부를 걸었습니다. 알파고에 활용된 딥러닝 기술을 응용했습니다. 이렇게 하면 자동차가 여러 상황을 스스로 학습해서 판단을 합니다. 시험 주행을 계속할수록 차가 더 똑똑한 판단을 내리는겁니다.
이 차도 뭔가 다릅니다. 차이가 보이시나요? 라이다 4개를 차량 지붕 위에 모아서 올렸습니다. 주행 중에는 이 라이다가 360도로 계속 회전합니다. 구글의 무인차량이 채택한 방식입니다. 라이다 한 개는 위아래로는 수직으로, 좌우로는 약 180도를 감지합니다. 이 때문에 차가 둔턱을 넘어가거나 흔들리면 순간적으로 탐지 범위가 변하면서 놓치는 사각이 생깁니다. 그래서 이 차처럼 라이다를 수평으로 세워서 4방향으로 배치한 뒤 회전시키는 아이디어가 나온 겁니다. 탐지 범위를 넓혀서 사각을 줄이고 인식률을 높이려는 목적입니다.
부품과 비용의 제한 이외에도 지켜야 하는 규정이 있습니다. 엔진, 기어, 제동장치 제어는 전자신호가 아니라 물리적으로 해야 합니다. 차량의 전자두뇌, 컴퓨터로 치면 CPU에 해당하는 ECU에 바로 신호를 보내서 제어할 수 있지만, ECU를 조작하려면 ECU의 코드를 알아야 합니다. 그런데 그건 자동차 업체의 영업 기밀에 해당합니다. 이 때문에 ECU 조작을 허용할 때 어느 정도까지 그 대학팀에게 ECU 정보를 알려주는가에 따라 형평성 논란이 있을 수 있습니다. 그래서 참가팀들은 모터나 와이어, 또는 로봇 팔 장치 등 물리적인 힘으로 기어를 바꾸고, 브레이크와 가속페달을 조작해야 합니다. 그리고 혹시 모를 돌발 상황에 대비해 외부에서 누르면 바로 정지하는 스위치가 필요합니다.
참가 차들은 이런 코스를 20분 안에 주행해야 합니다. 실제 운전면허 시험처럼 둔턱을 넘고, 정지선을 지켜야 하고, 앞에 사람 모양의 마네킹이 나오면 순식간에 정지해야 합니다. T자 주차 코스도 있는데, 어려운 기술이어서 그런지 시도하는 팀은 많지 않았습니다. 거기서 시간을 허비하느니 전체 주행 시간을 줄이는 것이 유리하다는 판단에서입니다. 가다가 코스를 벗어나는 경우 차가 스스로 재출발할 때, 사람이 조작을 한 뒤 재출발 할 때 감점도 다릅니다.
참가팀의 실력은 하루 만에 일취월장했다고 합니다. 어제 시험주행 때만 해도 코스를 완전히 벗어나거나 엉뚱하게 가는 차들이 많았다는데 오늘은 그런 모습은 보기 어려웠습니다. 시험 주행을 한 뒤 학생들은 코스에 맞춰 밤새 라이다와 카메라 각도를 조절하고, 운행 소프트웨어도 수정하느라 밤을 새웠습니다. 물론 차가 이러지도 저러지고 못하고 앞 뒤로 움직인다거나 코스를 일부 이탈하는 경우는 빈번했습니다. 완벽하게 달리면 그건 대학생들이 만든 자율주행차가 아니겠죠.
하지만 분명히 말씀드릴 수 있는 건 16년 전 제가 운전면허를 따기 위해 운전학원 코스를 처음 주행하던 때보단 더 훌륭하게 나아가는 차가 많았다는 겁니다. 난코스에서 차가 헤맬 때 아쉬움의 탄식을, 어려운 과제를 거뜬히 돌파할 때 환호와 박수를 보내는 대학생들이 구현해낸 기술의 진보 덕입니다.
-
-

지형철 기자 ican@kbs.co.kr
지형철 기자의 기사 모음
-
이 기사가 좋으셨다면
-
좋아요
0
-
응원해요
0
-
후속 원해요
0
오늘의 핫 클릭
실시간 뜨거운 관심을 받고 있는 뉴스
헤드라인


![[단독] 수사 무마 명목으로 뇌물수수 정황…현직 경찰 체포](/data/layer/904/2024/04/20240423_Ulc40k.jpg)


많이 본 뉴스
-
각 플랫폼에서 최근 1시간 동안 많이 본 KBS 기사를 제공합니다.
-
각 플랫폼에서 최근 1시간 동안 많이 본 KBS 기사를 제공합니다.
-
각 플랫폼에서 최근 1시간 동안 많이 본 KBS 기사를 제공합니다.
이 기사에 대한 의견을 남겨주세요.