









백사장에서도 끄떡 없어…‘사족보행 로봇’ 기술 성큼
입력 2023.01.26 (19:32)
수정 2023.01.26 (20:12)
읽어주기 기능은 크롬기반의
브라우저에서만 사용하실 수 있습니다.
![[여기는 전남] 여수산단서 유해물질 30ℓ 유출…인명피해 없어 외](https://news.kbs.co.kr/data/news/title_image/newsmp4/gwangju/news7/2023/01/26/160_7590637.jpg)
[앵커]
요즘 국내외에서 네발로 움직이는 이른바 '사족보행 로봇' 개발에 관심이 많은데요.
해변 백사장이나 잔디밭 등 다양한 지형에서도 고속 보행이 가능한 사족보행 로봇을 국내 연구진이 개발했습니다.
이 특별한 로봇을 박장훈 기자가 소개합니다.
[리포트]
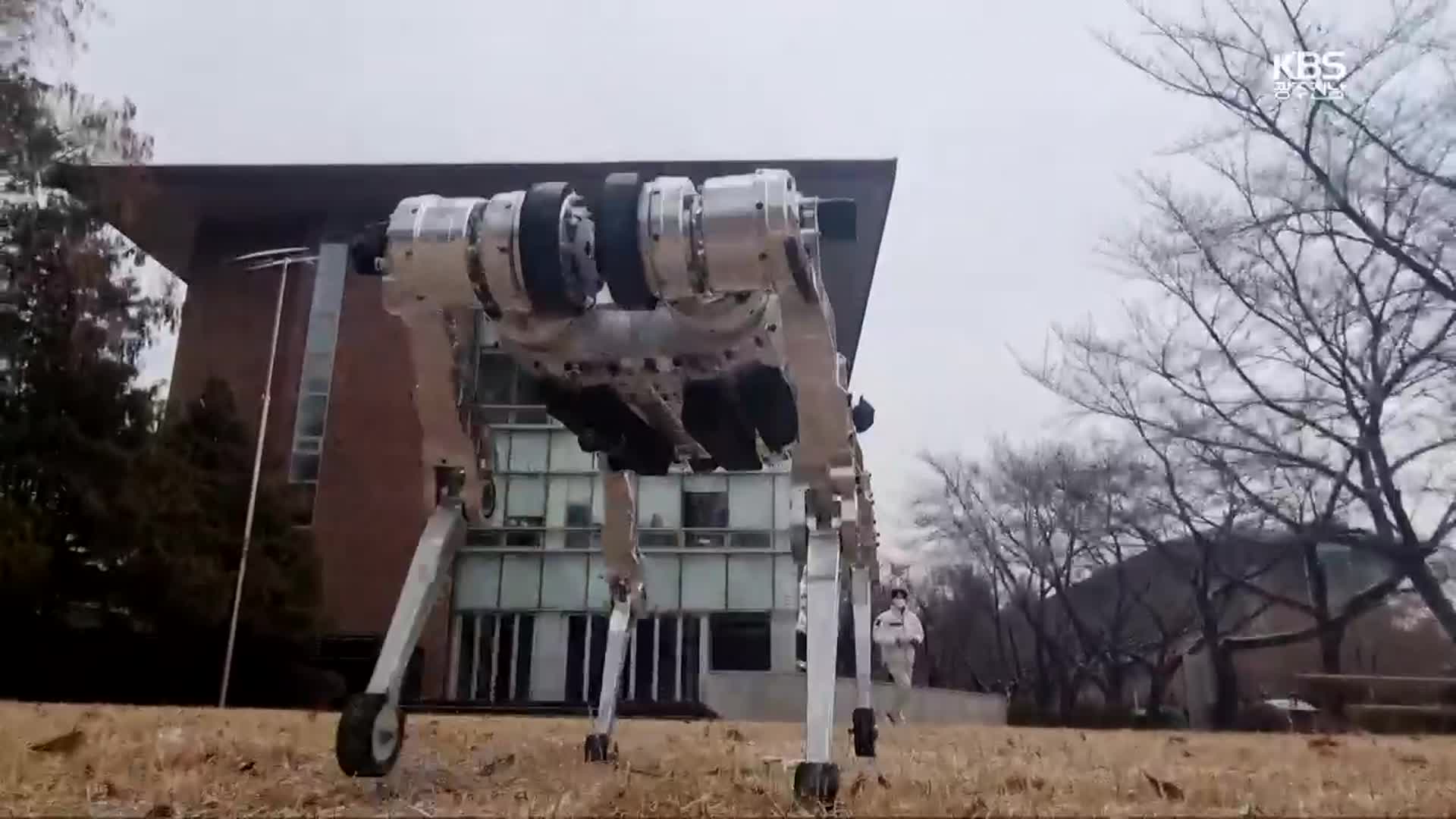
카이스트 연구팀이 개발한 네발 달린 로봇 '라이보'입니다.
전체 관절이 12개로, 백사장을 마치 맹수처럼 성큼성큼 걷습니다.
속도를 높이자 발이 빠지면서도 초속 3m의 빠른 속도로 모랫바람을 일으키며 내달립니다.
푹신푹신한 매트리스에서는 초당 90도로 회전을 하며 자유자재로 움직입니다.
다양하게 변형된 지형에서 로봇에게 전달되는 힘을 3차원 그래픽으로 만들어 형상화하고, 이 데이터를 모의 실험을 통해 학습시킨 보행 제어 기술입니다.
[최수영/카이스트 기계공학과 박사과정 : "입상 물질에서 로봇의 발이 침투해 들어 가면서 받는 힘을 모델링(형상화)함으로써 로봇을 시뮬레이션(모의 실험) 할 수 있었고, 이로부터 다양한 접촉 경험을 만들어서 로봇이 자유롭게 변형하는 지형에서 돌아다닐 수 있게..."]
이 로봇은 추가 제어 없이도 눈길이나 잔디밭, 육상 트랙 등에서 안정적으로 걷거나 뛸 수 있습니다.
인공신경망 구조가 적용돼 시각 등 사전 정보 없이 다양한 지반을 스스로 인식하는 겁니다.
[황보제민/카이스트 기계공학과 교수 : "인공신경망이 관절들의 움직이는 기록들을 보고 어떻게 움직였는지를 보고, 이 지형의 매개 변수들을 예측하는 거죠."]
연구팀은 다양한 지형에서의 보행 범위를 넓혀 산업현장 안전관리용이나 정찰, 감시용 등으로 이 로봇을 활용할 계획입니다.
KBS 뉴스 박장훈입니다.
촬영기자:강욱현
요즘 국내외에서 네발로 움직이는 이른바 '사족보행 로봇' 개발에 관심이 많은데요.
해변 백사장이나 잔디밭 등 다양한 지형에서도 고속 보행이 가능한 사족보행 로봇을 국내 연구진이 개발했습니다.
이 특별한 로봇을 박장훈 기자가 소개합니다.
[리포트]
카이스트 연구팀이 개발한 네발 달린 로봇 '라이보'입니다.
전체 관절이 12개로, 백사장을 마치 맹수처럼 성큼성큼 걷습니다.
속도를 높이자 발이 빠지면서도 초속 3m의 빠른 속도로 모랫바람을 일으키며 내달립니다.
푹신푹신한 매트리스에서는 초당 90도로 회전을 하며 자유자재로 움직입니다.
다양하게 변형된 지형에서 로봇에게 전달되는 힘을 3차원 그래픽으로 만들어 형상화하고, 이 데이터를 모의 실험을 통해 학습시킨 보행 제어 기술입니다.
[최수영/카이스트 기계공학과 박사과정 : "입상 물질에서 로봇의 발이 침투해 들어 가면서 받는 힘을 모델링(형상화)함으로써 로봇을 시뮬레이션(모의 실험) 할 수 있었고, 이로부터 다양한 접촉 경험을 만들어서 로봇이 자유롭게 변형하는 지형에서 돌아다닐 수 있게..."]
이 로봇은 추가 제어 없이도 눈길이나 잔디밭, 육상 트랙 등에서 안정적으로 걷거나 뛸 수 있습니다.
인공신경망 구조가 적용돼 시각 등 사전 정보 없이 다양한 지반을 스스로 인식하는 겁니다.
[황보제민/카이스트 기계공학과 교수 : "인공신경망이 관절들의 움직이는 기록들을 보고 어떻게 움직였는지를 보고, 이 지형의 매개 변수들을 예측하는 거죠."]
연구팀은 다양한 지형에서의 보행 범위를 넓혀 산업현장 안전관리용이나 정찰, 감시용 등으로 이 로봇을 활용할 계획입니다.
KBS 뉴스 박장훈입니다.
촬영기자:강욱현
■ 제보하기
▷ 카카오톡 : 'KBS제보' 검색, 채널 추가
▷ 전화 : 02-781-1234, 4444
▷ 이메일 : kbs1234@kbs.co.kr
▷ 유튜브, 네이버, 카카오에서도 KBS뉴스를 구독해주세요!
- 백사장에서도 끄떡 없어…‘사족보행 로봇’ 기술 성큼
-
- 입력 2023-01-26 19:32:19
- 수정2023-01-26 20:12:44
[앵커]
요즘 국내외에서 네발로 움직이는 이른바 '사족보행 로봇' 개발에 관심이 많은데요.
해변 백사장이나 잔디밭 등 다양한 지형에서도 고속 보행이 가능한 사족보행 로봇을 국내 연구진이 개발했습니다.
이 특별한 로봇을 박장훈 기자가 소개합니다.
[리포트]
카이스트 연구팀이 개발한 네발 달린 로봇 '라이보'입니다.
전체 관절이 12개로, 백사장을 마치 맹수처럼 성큼성큼 걷습니다.
속도를 높이자 발이 빠지면서도 초속 3m의 빠른 속도로 모랫바람을 일으키며 내달립니다.
푹신푹신한 매트리스에서는 초당 90도로 회전을 하며 자유자재로 움직입니다.
다양하게 변형된 지형에서 로봇에게 전달되는 힘을 3차원 그래픽으로 만들어 형상화하고, 이 데이터를 모의 실험을 통해 학습시킨 보행 제어 기술입니다.
[최수영/카이스트 기계공학과 박사과정 : "입상 물질에서 로봇의 발이 침투해 들어 가면서 받는 힘을 모델링(형상화)함으로써 로봇을 시뮬레이션(모의 실험) 할 수 있었고, 이로부터 다양한 접촉 경험을 만들어서 로봇이 자유롭게 변형하는 지형에서 돌아다닐 수 있게..."]
이 로봇은 추가 제어 없이도 눈길이나 잔디밭, 육상 트랙 등에서 안정적으로 걷거나 뛸 수 있습니다.
인공신경망 구조가 적용돼 시각 등 사전 정보 없이 다양한 지반을 스스로 인식하는 겁니다.
[황보제민/카이스트 기계공학과 교수 : "인공신경망이 관절들의 움직이는 기록들을 보고 어떻게 움직였는지를 보고, 이 지형의 매개 변수들을 예측하는 거죠."]
연구팀은 다양한 지형에서의 보행 범위를 넓혀 산업현장 안전관리용이나 정찰, 감시용 등으로 이 로봇을 활용할 계획입니다.
KBS 뉴스 박장훈입니다.
촬영기자:강욱현
요즘 국내외에서 네발로 움직이는 이른바 '사족보행 로봇' 개발에 관심이 많은데요.
해변 백사장이나 잔디밭 등 다양한 지형에서도 고속 보행이 가능한 사족보행 로봇을 국내 연구진이 개발했습니다.
이 특별한 로봇을 박장훈 기자가 소개합니다.
[리포트]
카이스트 연구팀이 개발한 네발 달린 로봇 '라이보'입니다.
전체 관절이 12개로, 백사장을 마치 맹수처럼 성큼성큼 걷습니다.
속도를 높이자 발이 빠지면서도 초속 3m의 빠른 속도로 모랫바람을 일으키며 내달립니다.
푹신푹신한 매트리스에서는 초당 90도로 회전을 하며 자유자재로 움직입니다.
다양하게 변형된 지형에서 로봇에게 전달되는 힘을 3차원 그래픽으로 만들어 형상화하고, 이 데이터를 모의 실험을 통해 학습시킨 보행 제어 기술입니다.
[최수영/카이스트 기계공학과 박사과정 : "입상 물질에서 로봇의 발이 침투해 들어 가면서 받는 힘을 모델링(형상화)함으로써 로봇을 시뮬레이션(모의 실험) 할 수 있었고, 이로부터 다양한 접촉 경험을 만들어서 로봇이 자유롭게 변형하는 지형에서 돌아다닐 수 있게..."]
이 로봇은 추가 제어 없이도 눈길이나 잔디밭, 육상 트랙 등에서 안정적으로 걷거나 뛸 수 있습니다.
인공신경망 구조가 적용돼 시각 등 사전 정보 없이 다양한 지반을 스스로 인식하는 겁니다.
[황보제민/카이스트 기계공학과 교수 : "인공신경망이 관절들의 움직이는 기록들을 보고 어떻게 움직였는지를 보고, 이 지형의 매개 변수들을 예측하는 거죠."]
연구팀은 다양한 지형에서의 보행 범위를 넓혀 산업현장 안전관리용이나 정찰, 감시용 등으로 이 로봇을 활용할 계획입니다.
KBS 뉴스 박장훈입니다.
촬영기자:강욱현
-
-

박장훈 기자 pjh@kbs.co.kr
박장훈 기자의 기사 모음
-
이 기사가 좋으셨다면
-
좋아요
0
-
응원해요
0
-
후속 원해요
0
광주-주요뉴스
오늘의 핫 클릭
실시간 뜨거운 관심을 받고 있는 뉴스
헤드라인
![[속보] 정성호 “검찰 해체 표현 부적절…국민 요구사항, 검사들도 잘 알 것”](/data/layer/904/2025/07/20250701_86evyp.png)



이 기사에 대한 의견을 남겨주세요.